一成分接触現像ニップでの電荷移動現象に関する検討
Study of Charge Transfer Phenomenon in Development Nip of Mono-component
System
中川 秀一
*生野 秀一
**Shuuichi NAKAGAWA Hidekazu SHONO
要 旨 一成分接触現像ニップにおける電荷移動現象について調査した結果,感光体表面に形成された 静電潜像の電位が,現像ニップ通過の前後で変化していることが確認された.これは,現像ロー ラに印加された現像バイアスが,トナー層を伝って感光体表面に充電される現象であり,このと きのトナー層内を流れる電流量は,感光体と現像ローラの速度差に依存することがわかった.そ こで,現像ニップ中のトナー層の動的抵抗を想定した感光体表面の充電モデルを作成し,注目す べき制御因子や,誤差因子への影響に関する考察を行った. ABSTRACT
We have examined the charge transfer phenomena in contact development nip of mono-component system in electrophotography. As a result, the potential of the electrostatic latent image on the photoconductor surface was changed by passing the development nip. This phenomenon is obviously a charge transfer to the photoconductor surface through the toner layer from development roller by developing bias between photoconductor and development roller. In addition, the amount of current by the charge transfer depends on the speed difference between the photoconductor and development roller. Based on the experimental results, we proposed a model of the charge transfer to the photoconductor surface due to the dynamic resistance of the toner layer in development nip, and considered the noteworthy control factor and the error factor.
* 画像エンジン開発本部 機能材料開発センター
Functional Material Development Center, Imaging Engine Development Devision ** プリンタ事業本部 LP設計センター
1.
背景と目的
乾式電子写真プロセスにおいて,一成分接触現像方 式は小型化や低コスト化が容易であることやメンテナ ンスフリーに対応可能であるという特長を活かして, おもに低価格帯のプリンターを中心に採用されている. この現像方式の現像特性1, 2)は現像ローラ上に形成した トナー層の帯電量に大きく依存することから,規制 ニップにおける規制ブレードとトナーの摩擦帯電メカ ニズムや,トナー層内の電荷移動に関する研究3, 4, 5)が 進められてきた. そこで,接触現像ニップにおいても同様に電荷移動 が感光体やトナー層に影響を与えていると推測し,市 販の一成分レーザープリンターに種々のトナーを詰め 替えて調べたところ,トナーが現像付着していない箇 所の感光体表面電位が接触現像ニップ通過前後で変化 していることが観察された.また,その変化程度がト ナーによって異なることも確認された. 本研究では,接触現像ニップでの電荷移動に関する 実験結果に基づいて現象メカニズムを解明するととも に,今後の一成分接触現像システムの設計での新たな 評価特性値を提示するための検討を行なった.2.
実験
2-1 実験装置 接触現像ニップ通過が感光体の表面電位に与える影 響に関する実験は,Fig.1に示す現像シミュレータを用 いて行なった.この現像シミュレータは一般的な一成 分接触現像方式の構成を再現したものであり,潜像担 持体にはPETフィルム(東レ社製メタルミー)を用い ている.PETフィルム裏面にはアルミ蒸着が施されて おり,金属ローラに密着して取り付けることによって 電気的に接地される.室内照明下でも蓄えた電荷を保 持できるので,潜像状態に関する詳細な測定を行なう ことができる.I
PET Film Development Roller Supply Roller Regulating Blade Metal Roller VBFig.1 Schematic drawing of the development simulator. 主要部材の設定値をTable 1に示す.PETフィルムの 初期表面電位はゼロに設定し,現像バイアスVBの水準 を段階的に振ることによって,接触現像ニップにおけ るPETフィルムと現像ローラとの電位差を変化させた. トナーは負帯電極性を有するもので,前述の観察結果 で最も現象が顕著に現れていたトナーAを用いた.
Table 1 Main Specifications of the development simulator.
Development Roller Diameter : 12 mm Elastic material : Urethane Rubber PET Film Thickness : 0.04 mm Permittivity : 2.9×10-11
Metal Roller Diameter : 40 mm Contact nip length : 1.1 mm Contact nip width : 60 mm
2-2 速度設定条件 主要部材の速度設定条件はTable 2に示す24種類の組 み合わせとした.とくに#1~#16は,PETフィルムが接 触現像ニップを通過する時間と,接触現像ニップにお けるPETフィルムと現像ローラの速度差に着目したも のである.
Table 2 Experimental conditions of the development simulator. #1 #2 #3 #4 #5 #6 #7 #8 Speed of PET film (mm/sec) 25 50 100 25 50 100 150 180 Speed of dev. Roller (mm/sec) 182 207 257 132 157 207 257 287 Time for passage (msec) 44 22 11 44 22 11 7 6 Speed difference (mm/sec) 157 107 #9 #10 #11 #12 #13 #14 #15 #16 Speed of PET film (mm/sec) 25 50 100 150 180 50 100 180 Speed of dev. Roller (mm/sec) 82 107 157 207 237 77 127 207 Time for passage (msec) 44 22 11 7 6 22 11 6 Speed difference (mm/sec) 57 27 #17 #18 #19 #20 #21 #22 #23 #24 Speed of PET film (mm/sec) 80 60 140 80 120 150 100 140 Speed of dev. Roller (mm/sec) 205 155 215 155 165 177 105 140 Time for passage (msec) 14 18 8 14 9 7 11 8 Speed difference (mm/sec) 125 95 75 75 45 27 5 0 2-3 PET表面電位測定 現像動作途中に駆動を停止させた後,接触現像ニッ プ通過後のPETフィルム表面電位VPETを測定した.測 定は,金属ローラを接地した状態で表面電位計を用い て行なった.現像バイアスVB水準によってはトナーが 現像されてPETフィルム表面に付着してしまうが,エ アーブロー清掃によって付着トナーを除去した後の表 面電位を測定した. 2-4 トナー層表面電位測定 現像動作途中に駆動を停止させた後,接触現像ニッ プ通過前と通過後の2箇所について現像ローラ上トナー 層表面電位を測定し,その差分を計算してトナー層電 位変化量⊿VTを求めた.測定は,現像バイアスVBをゼ ロとした状態で表面電位計を用いて行なった.ただし 現像によるトナー移動のない状態でのデータを取るた めに,限定した範囲の現像バイアスVB水準のみで測定 した. 2-5 PETフィルム電流測定 現像動作中にPETフィルムから流れる電流Iを測定し た.測定は,金属ローラとGNDとの間にマルチメータ を接続して行なった.測定した電流Iの値は,PETフィ ルムの静電容量と接触現像ニップ通過に要した時間か らPETフィルム表面電位に換算した.ここでも現像に よるトナー移動のない状態でのデータを取るために, 限定した範囲の現像バイアスVB水準のみで測定した.
3.
実験結果
3-1 現像バイアスと表面電位変化量の関係 Fig.2は,接触現像ニップ通過後のPETフィルム表面 電位VPETおよび通過前後でのトナー層電位変化量⊿VT について,現像バイアスVBに対する変化挙動を表した グラフの代表例である.PETフィルム表面電位VPETの データは,2-3で説明した方法によるVPET(実測値)と, 2-5で説明した方法によるVPET(換算値)の両方をプ ロットしたが,ともに現像バイアスVBに依存して直線 的に変化した.一方で,現像ローラ上トナー層電位は 接触現像ニップ通過前後で殆ど変化せず,現像バイア スVBの影響を受けることもなかった.なお,この所見 は全ての実験データに共通して確認されたものである.Developing Bias VB Po te n tial C h an ge s V (Measured) V (Converted) ⊿V PET PET T High 0 0 High
Fig.2 Relationship between developing bias and amount of surface potentials changes.
Fig.3には,全速度条件におけるVPET(実測値)と VPET(換算値)の相関関係を示した.様々の速度条件 下であっても両者はほぼ合致した. 0 100 200 300 400 0 100 200 300 400 Measured VPET (V) C onv er te d VPE T ( V )
Fig.3 Relationship between measured VPET and
converted VPET. これらのことから,接触現像ニップ通過によるPET フィルム表面電位の変化は,現像ローラに印加された 現像バイアスがトナー層を介してPETフィルムに充電 される現象であり,PETフィルム表面電位VPETは接触 現像ニップを通過する時間内にPETフィルムに注入さ れた電荷量によって決まるものと言える. そこでFig.2のグラフ中の近似直線の傾きを注入効率 αと定義し,PETフィルムへの電荷注入しやすさを示 す数値指標として用いることにした. 3-2 速度条件の影響 #1から#16の速度条件について,現像バイアスVBに 対するPETフィルム表面電位VPET実測値の関係を示し たものがFig.4である. Fig.4では現像ローラとPETフィルムの速度差(以下, 現像速度差βと呼ぶ)によってグラフ(A)から(D)に分 類し,それぞれに接触現像ニップ通過時間tの影響を表 -100 0 100 200 300 400 -200 0 200 400 Developing Bias VB (V) Me a sur ed VPE T (V ) #1:t=44 msec #2:t=22 msec #3:t=11 msec -100 0 100 200 300 400 -200 0 200 400 Developing Bias VB (V) Mea su red V PE T (V ) #4:t=44 msec #5:t=22 msec #6:t=11 msec #7:t= 7 msec #8:t= 6 msec
(A) Speed difference β=157 mm/sec (B) Speed difference β=107 mm/sec -100 0 100 200 300 400 -200 0 200 400 Developing Bias VB (V) Mea su red V PE T (V ) # 9:t=44 msec #10:t=22 msec #11:t=11 msec #12:t= 7 msec #13:t= 6 msec -100 0 100 200 300 400 -200 0 200 400 Developing Bias VB (V) M ea sur ed V PE T (V ) #14:t=22 msec #15:t=11 msec #16:t= 6 msec (C) Speed difference β=57 mm/sec (D) Speed difference β=27 mm/sec
Fig.4 Relationship between developing bias and measured VPET in various speed conditions.
した.その結果,各グラフに共通して,注入効率αが 接触現像ニップ通過時間tの順に並んでいることが確認 された.また現像速度差βの異なるグラフ間比較でも, 現像速度差βが小さいほど注入効率αも小さくなると いう傾向が見られた.
4.
充電モデル考察
4-1 等価回路モデルとその検証 ここまでの実験結果から,接触現像ニップ内におけ るPETフィルムの静電容量CPETとトナー層の抵抗RTの 直列回路による充電モデルを考えた. CPET RT VPET VB VTFig.5 Equivalent circuit of the development process. Fig.5の等価回路による充電特性の式をもとに,注入 効率αは接触現像ニップ通過時間tの関数として式(1) で表される.
V
PETV
B t CPET RT-α =
= 1 -
e
(1) 実験では注入効率αの値は時間tだけでなく現像速度 差βでも変化していたことから,式(1)中に現像速度差 βによって変動する可能性のあるものを探すと,ト ナー層抵抗RTのみがそれに該当する.従ってこのモデ ルでRTは定数ではなく,現像速度差βによって変化す るパラメータであると言える. モデルの検証は,Fig.4の実験データにおいて式(1)の 示す関係が成り立っていたか否かを確認することによ り行った.まず#1から#16の速度条件について注入効 率αの値を求め,接触現像ニップ通過時間tとの関係を プロットした.そこに式(1)を当てはめて近似曲線を引 いたものがFig.6である. ここでは,RTによって式(1)を実験データにフィッ ティングさせているが,現像速度差βごとに異なるRT の値を選択することで,全ての実験データを近似曲線 の変化挙動にほぼ一致させることができた. 0.0 0.2 0.4 0.6 0.8 1.00.E+00 2.E-02 4.E-02 6.E-02 8.E-02 1.E-01 t (sec) α β= 157 mm/sec β= 107 mm/sec β= 57 mm/sec β= 27 mm/sec RT = 2.6×108Ω RT = 3.5×108Ω RT = 5.4×108Ω RT = 1.0×109Ω
Fig.6 Relationship between t and α.
これは,PETフィルム静電容量CPETとトナー層抵抗 RTの直列という簡単な等価回路によって現象が表され, 式(1)の関係が成立していることを裏付けるものである. 従ってトナー層抵抗RTの値は式(1)を変形させて得た式 (2)から求めることができる.
t
C
PETLog(1-α)
R
T= -
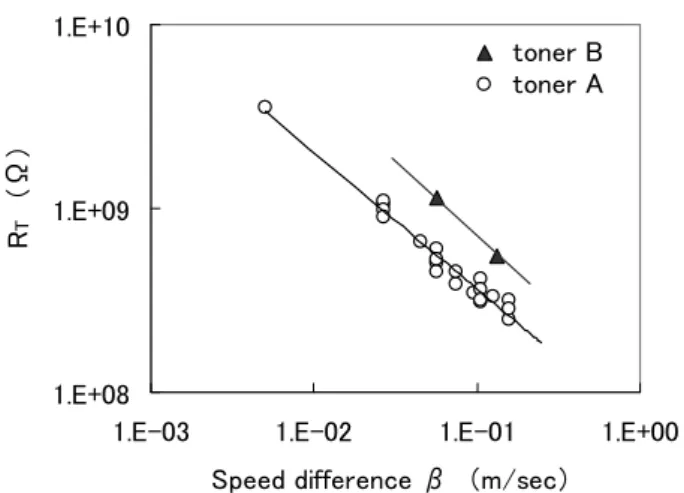
(2) 4-2 トナー層の動的抵抗 次に#1から#24の全実験データについて,接触現像 ニップ通過時間t,PETフィルム静電容量CPET,および 実験結果として得られた注入効率αから,式(2)を用い てトナー層抵抗RTを計算した.得られたRTの値と現像 速度差βとの相関関係グラフをFig.7に示す. またグラフには,比較用データとしてトナーBを用 いた同様実験の結果も併せてプロットした.このト ナーBは,第1章に記した感光体表面電位観察の際に, トナーAに比べて電位変化が小さかったものである.1.E+08 1.E+09 1.E+10
1.E-03 1.E-02 1.E-01 1.E+00 Speed difference β (m/sec)
R T ( Ω ) toner B toner A
Fig.7 Relationship between Speed difference and toner layer resistance.
トナー層抵抗RTと現像速度差βの関係は両対数グラ フ上で直線を示し,近似式(3)で表される.今回の実験 における式中の係数Yは,トナーAが6.6×107,トナーB が9.5×107であった.
R
T= Y β
-0.71 (3) 現像速度差βがゼロの条件では,トナー層抵抗RTは 無限大に大きくなり,VPETは殆んど変化せず金属ロー ラ電流Iも流れなかった. 以上のことから,現像ローラとPETフィルムが等速 回転している場合には,接触現像ニップ内に存在する トナー層は絶縁体に近い性質を示すが,現像ローラと PETフィルムに速度差を設けると,トナー粒子に動き が生じることによってトナー層内の電荷移動が可能と なり,導電性が現れるものと考えられる.一般にト ナーの電気的物性としての抵抗値測定は静的状態で行 なわれるので,等速回転時のトナー層抵抗に同じとみ なしてよい.これに対して速度差を設けた場合は,動 的状態でのトナー層抵抗であると言える. また,係数Yはトナーによって値が異なり,感光体 表面電位変化の小さかったトナーBのほうがYの値が大 きく,トナー層動的抵抗RTも比較的高くなるという結 果になった.そこでYを動的抵抗係数と呼び,トナー層 動的抵抗RTを決定するトナー側の因子として用いるこ とにした. 4-3 制御因子の効果予測 式(1)に,tとCPETの算出式および式(3)を代入すると 式(4)が得られる. D Y W εP υ0.29 (k - 1)-0.71-α = 1 -
e
(4) : PETフィルム厚 : 接触現像ニップ幅 : PETフィルム誘電率 : PETフィルム速度 : 速度比率(現像ローラ/PETフィルム) D W εP υ k ここで式(4)を用いて計算することによって,速度比 kを固定したままシステム全体の速度υを変えたときの 注入効率αの変化挙動を予測した.計算は,基準条件 である#a(トナーA使用)に対して,#b(トナーB使 用),#c(速度比kを低くした場合)の3条件について 行なった.計算に用いた数値条件をtable 3に,計算結 果をFig.8に示す.Table 3 Parameters for calculation.
#a #b #c PET Film Thickness (mm) tP 0.04 ← ← Permittivity εP 2.9E-11 ← ← Speed (mm/sec) υ 72 ← ← Contact NIP Width (mm) W 60 ← ← Speed ratio k 1.4 1.4 1.2 Toner Sample No. A B A
0.0 0.1 0.2 0.3 0.4 0.5 0 100 200 300 400 System speed υ (mm/s) α #a Reference #b Toner B
#c Lower the value of k
Fig.8 Calculated results of the relationship between υ and α at a constant speed ratio.
グラフは右下がりのカーブを描き,システム速度υ の低い領域では注入効率αが大きくなるという結果と なったが,これは式(4)の示すとおりである.速度比k および動的抵抗係数Yの効果の大きさも確認できるが, 速度比kを下げることは現像トナーの最低必要量から限 界があるため,動的抵抗係数Yを制御することが重要と なる.